Промышленный сервомотор Yaskawa Electric 4500 W 1500 RPM Сервомотор SGMDH-45A2B-YR14
БЫСКИЕ ДЕТАЛЫ
Модель SGMDH-45A2B-YR14
Тип продукции Сервомотор переменного тока
Номинальная мощность 4500w
Номинальный крутящий момент 28,4 Нм
Номинальная скорость 1500 оборотов в минуту
Напряжение питания 200vAC
Номинальный ток 32,4 ампер
ПРИМЕРНЫЕ ПРОДУКТЫ
Ясакава Мотор, Водитель SG- Mitsubishi Мотор HC-, HA-
Модули Вестингхауса 1С, 5Х, Эмерсон ВЕ, КД.
Мотор Honeywell TC-TK-Fanuc A0-
Радиопередатчик Розомаунта 3051- радиопередатчик Йокогавы EJA-
СОБЯЗНЫЕ ПРОДУКТЫ
| SGMDH |
описание |
производитель |
| SGMDH-056A2A-YR25 |
SGMDH056A2AYR25 сервомотор |
Яскава |
| SGMDH-06A2 |
SGMDH06A2 сервомотор |
Яскава |
| SGMDH-06A2A-TR25 |
SGMDH06A2ATR25 сервомотор |
Яскава |
| SGMDH-06A2A-YR |
SGMDH06A2AYR сервомотор |
Яскава |
| SGMDH-06A2A-YR11 |
SGMDH06A2AYR11 сервомотор |
Яскава |
| SGMDH-06A2A-YR12 |
SGMDH06A2AYR12 сервомотор |
Яскава |
| SGMDH-06A2A-YR13 |
SGMDH06A2AYR13 сервомотор |
Яскава |
| SGMDH-06A2A-YR14 |
SGMDH06A2AYR14 сервомотор |
Яскава |
| SGMDH-06A2A-YR24 |
SGMDH06A2AYR24 сервомотор |
Яскава |
| SGMDH-06A2A-YR25 |
SGMDH06A2AYR25 сервомотор |
Яскава |
| SGMDH-06A2A-YR26 |
SGMDH06A2AYR26 2,63NM 550W 4AMP 2000RPM 200V |
Яскава |
| SGMDH-12A2 |
Сервомотор SGMDH12A2 |
Яскава |
| SGMDH-12A2A-YA14 |
SGMDH12A2AYA14 сервомотор |
Яскава |
| SGMDH-12A2A-YR |
Сервомотор SGMDH12A2AYR |
Яскава |
| SGMDH-12A2A-YR12 |
Сервомотор SGMDH12A2AYR12 |
Яскава |
| SGMDH-12A2A-YR13 |
SGMDH12A2AYR13 AC 2000RPM 1150W 200V 7.3AMP 5.49NM |
Яскава |
| SGMDH-12A2A-YR14 |
Сервомотор SGMDH12A2AYR14 |
Яскава |
| SGMDH-12A2A-YR15 |
Сервомотор SGMDH12A2AYR15 |
Яскава |
| SGMDH-12A2A-YR21 |
Сервомотор SGMDH12A2AYR21 |
Яскава |
| SGMDH-12A2A-YRA1 |
Сервомотор SGMDH12A2AYRA1 |
Яскава |
| SGMDH-13A2A-YR23 |
Сервомотор SGMDH13A2AYR23 |
Яскава |
| SGMDH-20A2A21 |
SGMDH20A2A21 сервомотор |
Яскава |
| SGMDH-22A2 |
Сервомотор SGMDH22A2 |
Яскава |
| SGMDH-22A2A-YR11 |
SGMDH22A2AYR11 SIGMA II 2,2 кВт L/U AXIS SK45X |
Яскава |
| SGMDH-22A2A-YR12 |
Сервомотор SGMDH22A2AYR12 |
Яскава |
| SGMDH-22A2A-YR13 |
Сервомотор SGMDH22A2AYR13 |
Яскава |
| SGMDH-22A2A-YR13YA |
Сервомотор SGMDH22A2AYR13YA |
Яскава |
| SGMDH-22A2A-YR14 |
Сервомотор SGMDH22A2AYR14 |
Яскава |
| SGMDH-22A2A-YR32 |
SGMDH22A2AYR32 Сервомотор |
Яскава |
| SGMDH-22ACA61 |
SGMDH22ACA61 сервомотор |
Яскава |
| SGMDH-30A2A-YR31 |
Сервомотор SGMDH30A2AYR31 |
Яскава |
| SGMDH-30A2A-YR32 |
Сервомотор SGMDH30A2AYR32 |
Яскава |
| SGMDH-32A2 |
Сервомотор SGMDH32A2 |
Яскава |
| SGMDH-32A2A |
SGMDH32A2A сервомотор |
Яскава |
| SGMDH-32A2A-YA14 |
SGMDH32A2AYA14 Сервомотор |
Яскава |
| SGMDH-32A2A-YR11 |
SGMDH32A2AYR11 сервомотор |
Яскава |
| SGMDH-32A2A-YR12 |
Сервомотор SGMDH32A2AYR12 |
Яскава |
| SGMDH-32A2A-YR13 |
SGMDH32A2AYR13 AC 3.2KW SIGMA 2 S-AXIS |
Яскава |
| SGMDH-32A2A-YR14 |
Сервомотор SGMDH32A2AYR14 |
Яскава |
| SGMDH-32A2A-YR51 |
Сервомотор SGMDH32A2AYR51 |
Яскава |
| SGMDH-32A2A-YRA1 |
Сервомотор SGMDH32A2AYRA1 |
Яскава |
| SGMDH-32ACA-MK11 |
SGMDH32ACAMK11 Сервомотор |
Яскава |
| SGMDH-32P5A |
SGMDH32P5A сервомотор |
Яскава |
| SGMDH-40A2 |
Сервомотор SGMDH40A2 |
Яскава |
| SGMDH-40A2A |
SGMDH40A2A сервомотор |
Яскава |
| SGMDH-40ACA21 |
SGMDH40ACA21 сервомотор |
Яскава |
| SGMDH-44A2A-YR14 |
Сервомотор SGMDH44A2AYR14 |
Яскава |
| SGMDH-44A2A-YR15 |
Сервомотор SGMDH44A2AYR15 |
Яскава |
| SGMDH-45A2A6C |
SGMDH45A2A6C сервомотор |
Яскава |
| SGMDH-45A2B61 |
SGMDH45A2B61 Сервомотор |
Яскава |
| SGMDH-45A2BYR |
Сервомотор SGMDH45A2BYR |
Яскава |
| SGMDH-45A2B-YR13 |
Сервомотор SGMDH45A2BYR13 |
Яскава |
| SGMDH-45A2BYR14 |
Сервомотор SGMDH45A2BYR14 |
Яскава |
| SGMDH-45A2B-YR14 |
Сервомотор SGMDH45A2BYR14 |
Яскава |
| SGMDH-45A2BYR15 |
SGMDH45A2BYR15 сервомотор |
Яскава |
| SGMDH-45A2B-YR15 |
SGMDH45A2BYR15 сервомотор |
Яскава |
| SGMDH-6A2A-YR13 |
Сервомотор SGMDH6A2AYR13 |
Яскава |
| SGMDH-6A2A-YR25 |
Сервомотор SGMDH6A2AYR25 |
Яскава |
| SGMDH-A2 |
Сервомотор SGMDHA2 |
Яскава |
| SGMDH-A2A |
Сервомотор SGMDHA2A |
Яскава |
• Закрывая петлю скорости и петлю положения в компьютере, для обоих может использоваться одно и то же устройство обратной связи.Компьютерный подход по оси выгоден, если для петли скорости выбираются очень высокие скорости обновленияПри наличии нескольких осей нагрузка на центральный компьютер может быть слишком большой при высокой скорости обновления циклов.
• Если ожидается большое скоординированное движение, центральный компьютер будет иметь прямой доступ к каждой оси.связи между компьютерами приводят к задержкам, ограничивающим тесную координациюДля облегчения процесса циклы скорости могут оставаться аналоговыми с центральным компьютером.
Диаграмма Бода, похожая на показанную ниже, помогает определить, насколько хорошо выход или обратная связь (F) выполняет команду (C), показывая взаимосвязь между A и частотой возбуждения.Частота обычно выражается в радианах/сек..(ω) вместо циклов в секунду (f). Поскольку ω = 2πf ≈ 6.28 f, легко конвертировать из одного в другой. Кроме того, 1/ω, в секундах, является постоянной времени низкопропускного фильтра с полосой f.Как только мы знаем пропускную способность (ω) серво, мы знаем постоянную времени эквивалентного фильтра (1/ω) и, таким образом, можем предсказать его реакцию на входный шаг.
Для чего нужны шаговые двигатели?
Позиционирование ∙ Поскольку шаговые двигатели движутся в точных повторяемых шагах, они превосходят в приложениях, требующих точных
Некоторые дисковые приводы также используют шаговые двигатели для позиционирования головки чтения/записи.
Управление скоростью
автоматизация процессов и робототехника.
Низкоскоростной крутящий момент - Нормальные двигатели постоянного тока не имеют очень много крутящего момента на низких скоростях.
максимальный крутящий момент при низких скоростях, поэтому они являются хорошим выбором для приложений, требующих низких скоростей с высокими
точность.
Многие пользователи управления движением слышали, как поставщики пытаются объяснить определенные функции сервопривода с помощью диаграмм Бода.Правильное произношение - "Бо-ди"Подумайте только о Бо Дереке (что несложно сделать). Вы найдете другие сходства между ними (кого я обманываю?)

 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!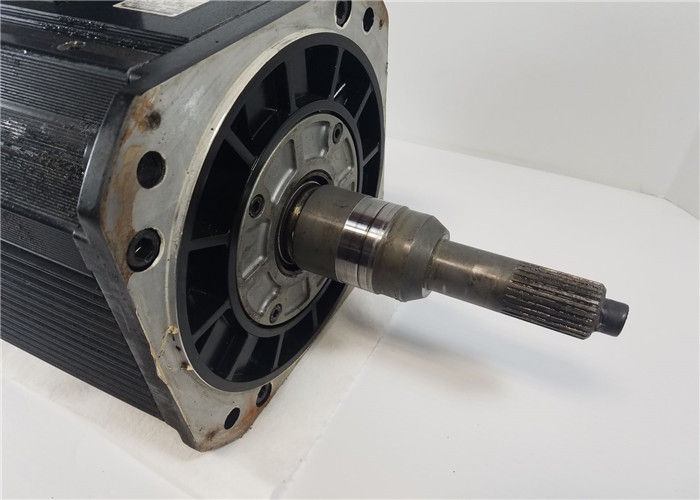
Общий рейтинг
Оценка
Ниже представлено распределение всех рейтингов:Все отзывы