SGMDH Sigma II Japan YASKAWA 15.3Н-м СЕРВОДВИГАТЕЛЬ 3200W SGMDH-32A2A-YR14
Технические характеристики
Модель SGMDH-32A2A-YR14
Тип продукта AC серводвигатель
Номинальная выходная мощность 200 Вт
Номинальный крутящий момент 15.3 Нм
Номинальная скорость 2000 об/мин
Напряжение питания 200 В переменного тока
Номинальный ток 20.9 Ампер
ДРУГИЕ ПРЕВОСХОДНЫЕ ПРОДУКТЫ
Двигатель Yasakawa, драйвер SG- Двигатель Mitsubishi HC-,HA-
Модули Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Двигатель Fanuc A0-
Передатчик Rosemount 3051- Передатчик Yokogawa EJA-
SПохожие продукты
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Наличие этого материала с высокой проницаемостью приводит к тому, что магнитный поток в основном ограничивается путями, определяемыми структурой статора, таким же образом, как токи ограничиваются проводниками электронной схемы. Это служит для концентрации потока на полюсах статора. The
Рисунок 4. Принцип работы дискового магнитного двигателя, разработанного Portescap.= N N N N S S S 3
Рисунок 5. Путь магнитного потока через двухполюсный шаговый двигатель с запаздыванием между ротором и статором.
Рисунок 6. Однополярные и биполярные обмотки шаговых двигателей. крутящий момент, создаваемый двигателем, пропорционален интенсивности магнитного потока, генерируемого при подаче энергии на обмотку.
Основная зависимость, определяющая интенсивность магнитного потока, определяется следующим образом:
H = (N × i) ÷ l где:
N = Количество витков обмотки
i = ток
H = Напряженность магнитного поля
l = Длина пути магнитного потока
Эта зависимость показывает, что интенсивность магнитного потока и, следовательно, крутящий момент пропорциональны
количеству витков обмотки и току и обратно пропорциональны длине пути магнитного потока.
Из этой основной зависимости можно увидеть, что шаговый двигатель того же размера корпуса может иметь совершенно разные характеристики крутящего момента, просто изменяя параметры обмотки. Более подробную информацию о том, как параметры обмотки влияют на выходную мощность двигателя, можно найти в примечании к приложению под названием «Основы схемы привода».
В отличие от двигателей постоянного тока, с серводвигателями вы можете позиционировать вал двигателя в определенном положении (угле), используя управляющий сигнал. Вал двигателя будет удерживаться в этом положении до тех пор, пока управляющий сигнал не изменится. Это очень полезно для управления руками роботов, поверхностью управления беспилотных самолетов или любым объектом, который вы хотите переместить под определенным углом и оставаться в новом положении.
Серводвигатели могут быть классифицированы по размеру или крутящему моменту, который они могут выдерживать, на мини, стандартные и гигантские сервоприводы. Обычно серводвигатели мини- и стандартного размера могут питаться непосредственно от Arduino без необходимости внешнего источника питания или драйвера.
Обычно серводвигатели поставляются с рычагами (металлическими или пластиковыми), которые подключены к объекту, который необходимо переместить (см. рисунок справа).
Третий вывод принимает управляющий сигнал, который представляет собой сигнал широтно-импульсной модуляции (ШИМ). Его можно легко создать всеми микроконтроллерами и платой Arduino.
Это принимает сигнал от вашего контроллера, который сообщает ему, на какой угол повернуться. Управляющий сигнал довольно прост по сравнению с шаговым двигателем. Это просто импульс различной длины. Длина импульса соответствует углу поворота двигателя.
Блок-схема управления серводвигателями
Импульсный сигнал, который подается извне (когда это тип импульсного входа), и вращение, обнаруженное энкодером серводвигателя, подсчитываются, и разница (отклонение) выводится в блок управления скоростью. Этот счетчик называется счетчиком отклонения.
Во время вращения двигателя в счетчике отклонения генерируется накопленный импульс (отклонение позиционирования), и он управляется таким образом, чтобы стремиться к нулю.
Функция удержания текущего положения (удержание положения с помощью сервоуправления) достигается с помощью контура позиционирования (счетчик отклонения).

 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!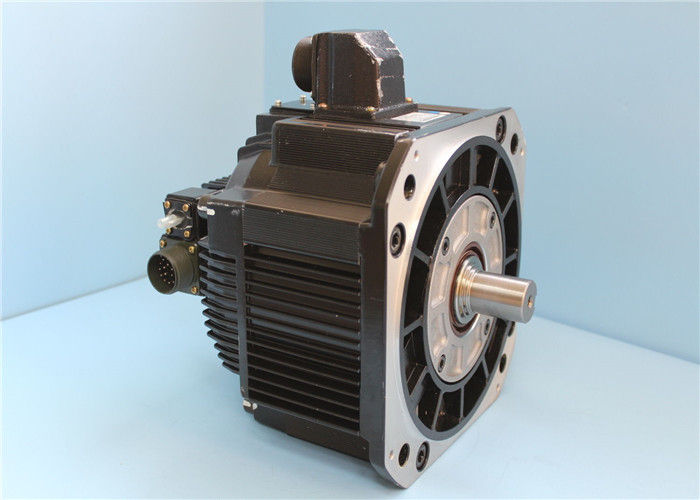
Общий рейтинг
Оценка
Ниже представлено распределение всех рейтингов:Все отзывы