SGMAH Sigma II Япония YASKAWA 0.637N.m Сервомотор INsB SGMAH-02AAN21
Спецификации
Модель SGMAH-02AAN21
Тип продукции Сервомотор переменного тока
Номинальная мощность 200 Вт
Номинальный крутящий момент 0,637 Нм
Номинальная скорость 3000 оборотов в минуту
Напряжение питания 200vAC
Номинальный ток 2.1 ампер
ПРИМЕРНЫЕ ПРОДУКТЫ
Ясакава Мотор, Водитель SG- Mitsubishi Мотор HC-, HA-
Модули Вестингхауса 1С, 5Х, Эмерсон ВЕ, КД.
Мотор Honeywell TC-TK-Fanuc A0-
Радиопередатчик Розомаунта 3051- радиопередатчик Йокогавы
SПродукты
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
В отличие от постоянного тока, при использовании сервомоторов можно расположить вал двигателя в определенном положении (угол) с помощью управляющего сигнала.Волокно двигателя будет держаться в этом положении до тех пор, пока сигнал управления не изменилсяЭто очень полезно для управления руками робота, беспилотных самолетов, поверхности управления или любого объекта, который вы хотите, чтобы он двигался под определенным углом и оставался на новом положении.
Сервомоторы могут быть классифицированы в зависимости от размера или крутящего момента, который он может выдержать, на мини, стандартные и гигантские сервомоторы.Обычно мини и стандартного размера сервомоторы могут питаться Arduino непосредственно без необходимости внешнего источника питания или драйвера.
Обычно сервомоторы поставляются с руками (металлами или пластмассой), которые подключены к объекту, требуемому для движения (см. рисунок справа).
Третий пин принимает сигнал управления, который является сигналом модуляции ширины импульса (PWM).
Это принимает сигнал от контроллера, который говорит ему, в какой угол повернуть. Сигнал управления довольно прост по сравнению с шаговым двигателем. Это просто импульс различной длины.Длина импульса соответствует углу вращения двигателя.
Диаграмма блока управления сервомоторов
Считывается импульсный сигнал, который подается извне (когда это тип входа импульса), и вращение, обнаруженное кодером сервомотора.и разница (отклонение) выводится на блок управления скоростьюЭтот счетчик называется счетчиком отклонений.
Во время вращения двигателя в счетчике отклонений генерируется накопленный импульс (отклонение от позиционирования) и контролируется таким образом, чтобы достичь нуля.
Функция поддержания текущего положения (держание положения при помощи сервоуправления) осуществляется с помощью петли положения (счетчик отклонений).

 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!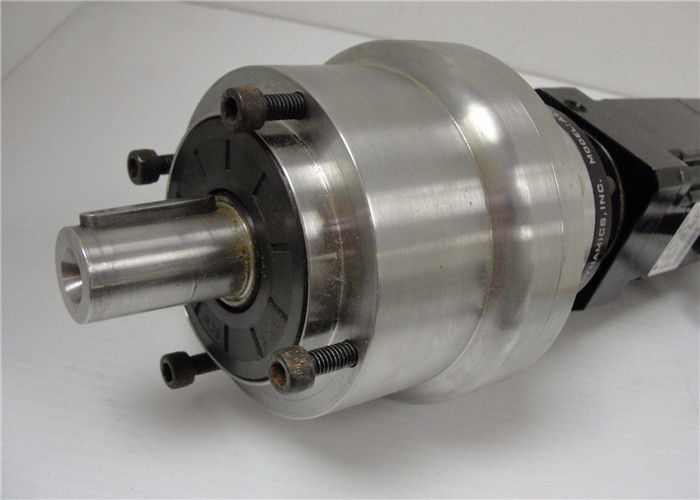
Общий рейтинг
Оценка
Ниже представлено распределение всех рейтингов:Все отзывы